1 DSOM-020 PX30 SOM Objectif et description
Le trou de tampon DSOM-020R PX30 Système sur module adopte le processeur industriel basse consommation 30 bits PX64 avec Cortex-A64 quadricœur 35 bits, fréquence jusqu'à 1.3 GHz, prend en charge plusieurs systèmes d'exploitation, avec une puissante capacité de décodage matériel et une interface riche. tels que I2C, UART, SPI, SPIO 3.0, USB2.0, PWN, RMII, I2S (prend en charge l'entrée de réseau de microphones numériques à 8 voies) et d'autres interfaces.
Le système sur module DSOM-020R PX30K convient au contrôle industriel, à l'alimentation, à la communication, à la médecine, aux médias, à la sécurité, aux véhicules, aux finances, à l'électronique grand public, aux appareils portables, aux consoles de jeux, au contrôle de l'affichage, aux instruments d'enseignement et à de nombreux autres domaines. Il peut être largement utilisé dans les systèmes de point de vente, les machines de jeux, les plates-formes d'expérimentation pédagogique, les terminaux multimédias, les PDA, les machines de commande de nourriture, les machines publicitaires et d'autres domaines.
Le système sur module DSOM-020R offre une large gamme de documents de développement et de ressources logicielles à la fois gratuits et open-source. Cette commodité permet aux développeurs d'améliorer leur efficacité de développement et de raccourcir le cycle de développement.
- Doté d'un facteur de forme compact et d'interfaces GPIO suffisantes
- Prise en charge de la fonction sommeil/réveil
- L'utilisation du PMU RK809 pour la gestion de l'alimentation garantit un fonctionnement stable et fiable tout en maintenant les coûts suffisamment bas
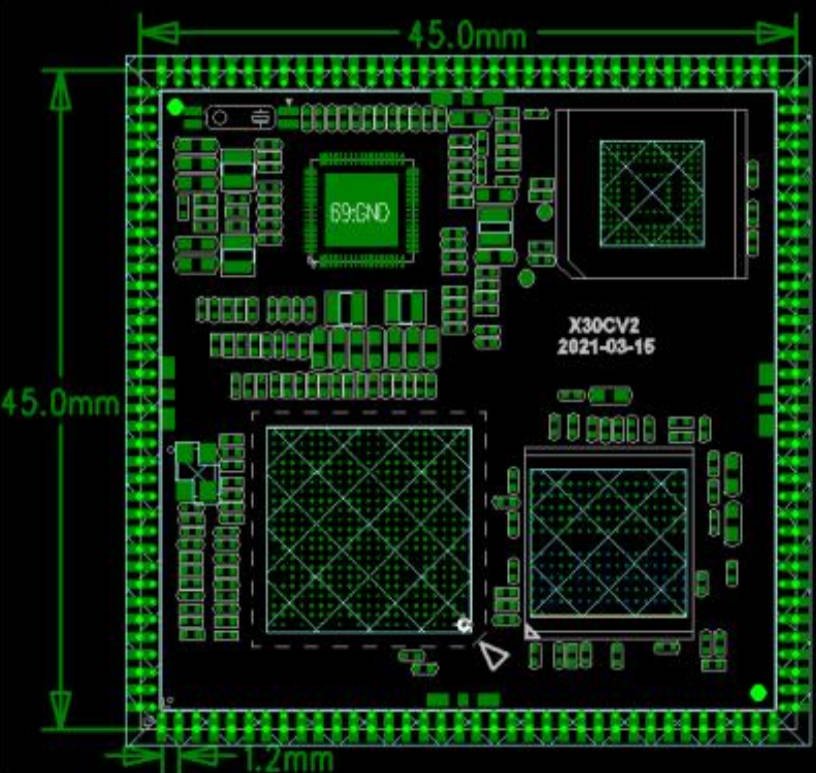
- Taille 45 mm * 45 mm
- eMMC jusqu'à 32 Go
- RAM jusqu'à 2 Go
- Prend en charge le sommeil et le réveil
- Prend en charge Buildroot, Linux + MiniGUI/QT, ROS
- Prend en charge Ethernet filaire 100M
- Conduit 144 broches PIN, y compris toutes les broches CPU
- RoHS certifié
- Produit stable et fiable testé pour les températures élevées et basses, les redémarrages répétés, la stabilité Android et la référence AnTuTu
- l Travailler en continu pendant 7 jours et 7 nuits sans plantage (ou échec).
- Équipement AIOT
- Contrôle du véhicule
- Équipement de jeu
- Matériel d'affichage commercial
- Équipement médical
- Distributeurs automatiques
- Ordinateurs industriels
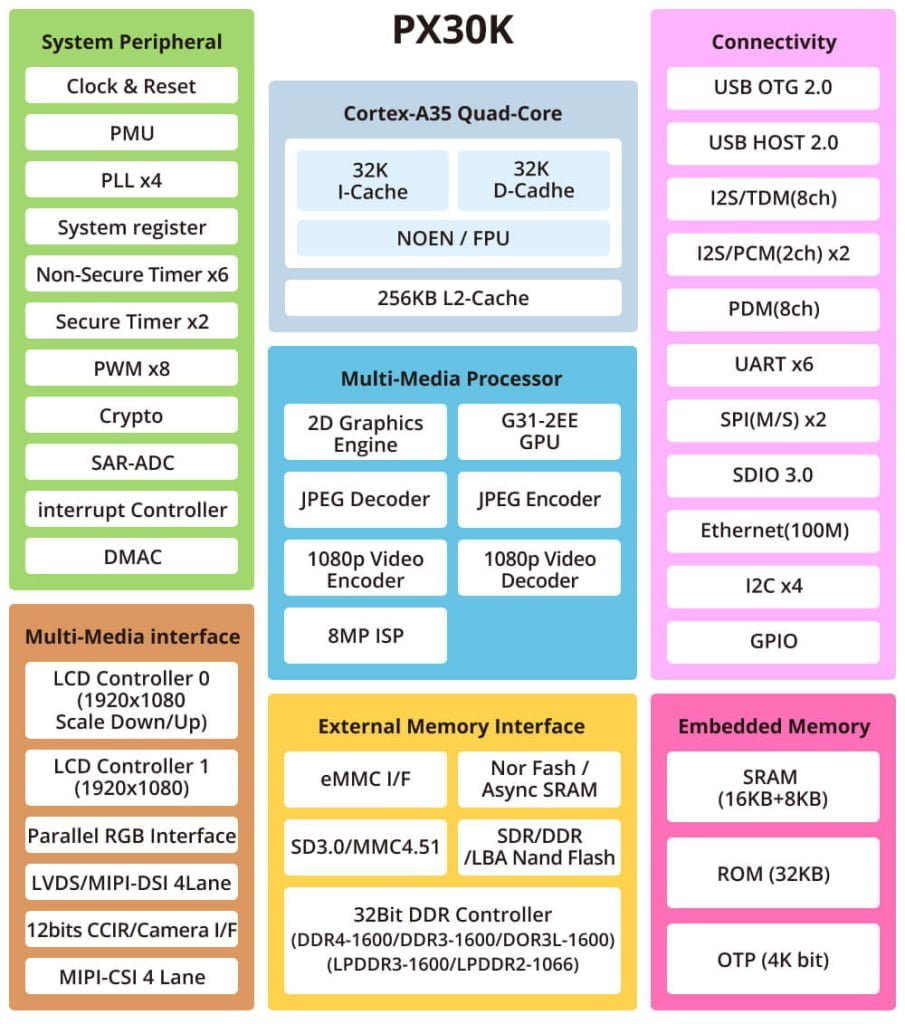
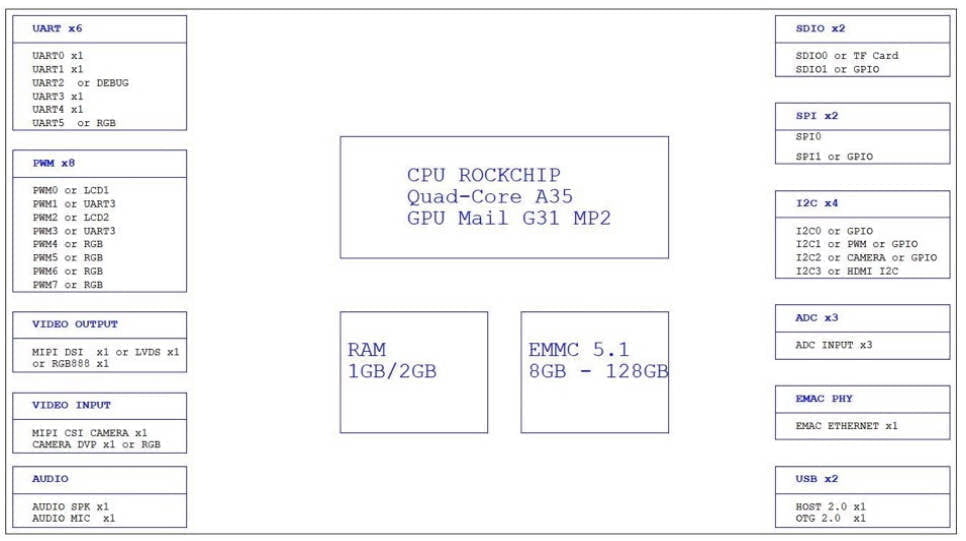
2 Schéma fonctionnel du système du DSOM-020 PX30 SOM
3 paramètres de base et interfaces du DSOM-020 PX30 SOM
| Produit | Paramètre |
|---|---|
| Processeur | Cortex-A64 quadricœur 35 bits, fréquence jusqu'à 1.3 GHz |
| GPU | Le GPU ARM G31-2EE intégré rend le PX30K entièrement compatible avec OpenGL ES 1.1/2.0/3.2, DirectX 11 FL9_3, OpenCL 2.0 et Vulkan 1.0. Matériel d'accélération 2D haute performance intégré intégré |
| RAM | LPDDR3 2 Go (1 Go en option) |
| Stockage | eMMC 32 Go (8 Go / 16 Go / 32 Go / 64 Go / 128 Go eMMC en option) |
| Gestion de l'alimentation | RK809-1 Réglage dynamique de la tension de sortie de chaque convertisseur DC-DC |
| Tension de fonctionnement | Tension typique 5V/1.5A |
| Tension d'entrée RTC | Tension typique 5V/30 uA |
| OS | Androïd / Debian |
| Température | Température de fonctionnement : -20 °C ~85 °C |
| Température de stockage : -40 °C ~85 °C | |
| Humidité | 10 ~ 95% (sans condensation) |
| Pression barométrique | 76Kpa à 106Kpa |
| Taille | 45mm x x 45mm 2.6mm |
| Produit | Paramètre |
|---|---|
| Ethernet | L'interface Ethernet 1M/10MHz à 100 canal nécessite une puce PHY externe |
| LCD | Prise en charge de l'interface MIPI, LVDS, RVB |
| tactile | Le toucher capacitif peut être étendu avec le toucher résistif du port USB ou série |
| Audio | AC97 / IIS, prend en charge l'enregistrement et la lecture de l'audio |
| TF | 1 canal de sortie SDIO |
| I2S | 1 interface I8S 2 canaux |
| SDIO | 1 x SDIO |
| eMMC | Interface eMMC intégrée, les broches ne sont pas sorties en plus |
| USB 2.0 | Interface USB 2 à 2.0 canaux, dont l'une est une interface USB OTG |
| UART | 6 x port série, à l'exception de UART2, les quatre autres canaux prennent en charge le contrôle de flux série |
| PWM | 8 sorties PWM |
| I2C | 4 x I2C |
| SPI | 2 x SPI |
| ADC | 3 x ADC |
| Appareil photo | 1 x interface d'entrée de caméra MIPI CSI ou interface d'entrée de caméra parallèle. |
| Optimisation | Prend en charge la mise à niveau locale via l'interface USB. |
Définition à 4 broches du SOM DSOM-020 PX30
| Pin | Définition de la broche | Type de tampon | Définition d'E/S | Niveau E/S (Haut/Bas) Unité : mA | Pilote d'E/S (Unité : V) | Tension d'E/S (Unité : V) | Les fonctions |
|---|---|---|---|---|---|---|---|
| 1 | GPIO0_A5 | I / O | I | up | 2 | 3.0 | GPIO0_A5 |
| 2 | GPIO0_C2/I2C1_S CL/UART3_CTS | I / O | I | down | 2 | 3.0 | Broches GPIO ou I2C ou broche de contrôle de flux UART 3 |
| 3 | GPIO0_C2/I2C1_S CL/UART3_CTS | I / O | I | down | 2 | 3.0 | Broches GPIO ou I2C ou broche de contrôle de flux UART 3 |
| 4 | GPIO0_B4/UART0 _CTS | I / O | I | up | 2 | 3.0 | Broche de contrôle de flux GPIO ou UART 0 |
| 5 | GPIO0_C0/PWM1 /UART3_TXD | I / O | I / O | down | 2 | 3.0 | Broche GPIO ou UART 3 TXD ou PWM |
| 6 | VCC3V3_LCD | P | N/D | N/D | Puissance de sortie 3.3V / 2.5A | ||
| 7 | LVDS_TX0N/MIPI _T X_D0N/LCDC_D1 1_M1 | A | N/D | 3.3 | Interface du pilote LCD | ||
REMARQUE:
Types d'E/S : I = entrée numérique, O = sortie numérique, I/O = entrée/sortie numérique (bidirectionnelle)
A=E/S analogique
Direction d'E/S par défaut pour les E/S numériques
Toutes les broches GPIO prennent en charge les interruptions. P = alimentation
VCC3V3_SYS, VCC3V0_PMU Il est préférable de ne pas alimenter ces sorties de puissance. Ils peuvent être utilisés comme alimentations pull-up
5 paramètres électriques du DSOM-020 PX30 SOM
| Paramètre | Description | Min | Type | Max | Unité |
|---|---|---|---|---|---|
| VCC5V0_SYS(_1/_2/_3) | VCC5V0_SYS Tension d'entrée | - 0.3 | 6.5 | V | |
| VCC_IO_RTC | Tension d'entrée RTC | - 0.3 | 6.5 | V | |
| Ta | Température de fonctionnement | - 20 | 85 | ℃ | |
| Ts | Stocker la plage de température | - 40 | 85 | ℃ |
Remarque:
L'exposition à des conditions au-delà des valeurs nominales maximales absolues peut causer des dommages permanents et affecter la fiabilité et la sécurité de l'appareil et de ses systèmes.
Les opérations fonctionnelles ne peuvent être garanties au-delà des valeurs spécifiées dans les conditions recommandées.
| Paramètre | Description | Min | Type | Max | Unité |
|---|---|---|---|---|---|
| VCC5V0_SYS | Tension d'entrée VCC5V0_SYS | 4.75 | 5 | 5.5 | V |
| VCC_RTC | Tension d'entrée RTC | 4.75 | 5 | 5.5 | V |
| Courant d'alimentation VCC5V0_SYS | Courant d'entrée VCC5V0_SYS | 1 | A | ||
| Courant d'alimentation VCC_RTC | 30 | uA | |||
| Ta | Température de fonctionnement | - 20 | 25 | 85 | ℃ |
| Ts | Stocker la plage de température | - 40 | 25 | 85 | ℃ |
6 directives de conception matérielle du SOM DSOM-020 PX30
La puce PX30K possède deux contrôleurs SPI qui peuvent être utilisés pour connecter des appareils SPI.
La conception recommandée pull-up/pull-down et correspondante pour l'interface SPI est indiquée dans le tableau ci-dessous
| Signal | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| SPI0_MOSI | Tirer vers le bas | Connexion directe | Transmission de données SPI |
| SPI0_MIS0 | Remonter | Connexion directe | Réception de données SPI |
| SPI0_CLK | Remonter | Série avec résistance 22ohm | Transmission d'horloge SPI |
| SPI0_CSN | Remonter | Connexion directe | Signal de sélection d'esclave SPI |
La puce PX30K fournit un contrôleur d'interface SDMMC qui prend en charge les protocoles SD v3.0 et MMCv4.51. Le pull-up/pull-down recommandé et la conception correspondante pour l'interface SDMMC sont indiqués dans le tableau ci-dessous
| Signal | Tirage interne haut / bas | Méthode de connexion (Mode haute vitesse SDR) | Description |
|---|---|---|---|
| SDMMC1_DQ[3:0] | Remonter | Série avec résistance 22ohm Lorsque la trace est courte, elle peut être supprimée | Données SD transmission / réception |
| SDMMC1_CLK | Tirer vers le bas | Série avec résistance 22ohm | Transmission d'horloge SD |
| SDMMC1_CMD | Remonter | Série avec résistance 22ohm Lorsque la trace est courte, elle peut être supprimée | Commande SD émission/réception |
La puce PX30K possède deux ensembles d'interfaces USB 2.0, l'une prenant en charge le mode OTG et l'autre agissant en tant qu'hôte. Veuillez noter ce qui suit lors de la conception :
- Les interfaces USB sont utilisées comme ort de gravure du micrologiciel système par défaut et doivent
être réservé lors de la conception. - USB_ID a une résistance pull-up interne de 200K, qui est tirée jusqu'à
- USB_AVDD_1V8, donc OTG est défini sur le mode périphérique par défaut.
- USB_DET (USB_VBUS) est utilisé pour la détection d'insertion USB, et lorsqu'il détecte un niveau élevé, cela signifie que l'USB a été inséré.
- Pour supprimer le rayonnement électromagnétique, il est recommandé de réserver une self de mode commun sur la ligne de signal. Pendant le débogage, utilisez une résistance ou un starter de mode commun selon le cas.
| Signal | Méthode de connexion | Description |
|---|---|---|
| USB_OTG_DP/DM | Connexion directe | Entrée/sortie USB OTG |
| ID_USB | Connexion directe (traction interne) | Reconnaissance d'identité USB OTG, utilisée pour l'interface Micro-B |
| USB_DET | Détection d'insertion USB OTG |
Règles de conception du signal USB2.0 :
- Le biais intra-paire des paires différentielles est inférieur à 2ps ;
- La longueur des paires différentielles est inférieure à 3 pouces ;
- Le nombre de vias pour les paires différentielles pour changer de couche est inférieur à 3 ;
- L'impédance des paires différentielles est contrôlée à moins de 90ohm +/-10%;
- L'espacement entre les paires différentielles et les autres signaux suit le principe 3W.
Le PX30K fournit trois interfaces I2S standard, toutes prenant en charge les modes maître et esclave avec un taux d'échantillonnage maximal de 192 kHz et un débit binaire allant de 16 bits à 32 bits.
● I2S0
L'interface I2S0 du PX30K fournit la sortie indépendante à 8 canaux et l'entrée à 8 canaux. Pour répondre aux besoins de taux d'échantillonnage asynchrones pour la lecture et l'enregistrement, deux ensembles d'horloges binaires et d'horloges de trame (SCLKTX/LRCKTX, SCLKRX/LRCKRX) sont également fournis. Il convient de noter que dans le cas où un seul ensemble d'horloges bit/trame est référencé pour SDOx et SDIx, SCLKTX/LRCKTX est préféré comme leur horloge standard.
| Signal | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| I2S0_8CH_MCLK | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Sortie horloge système |
| I2S0_8CH_SCLKTX | Tirer vers le bas | Série avec résistance 22ohm | Horloge bit I2S0 (TX, associée à SDOx) |
| I2S0_8CH_LRCKTX | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Sortie d'horloge de trame pour l'horloge de sélection de canal (TX, associée à SDOx) |
| I2S0_8CH_SDO0 | Tirer vers le bas | Série avec résistance 100ohm | I2S0 Canal de sortie de données 0 |
| I2S0_8CH_SDO1 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 1 |
| I2S0_8CH_SDO2 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 2 |
| I2S0_8CH_SDO3 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 3 |
| I2S0_8CH_SCLKRX | Tirer vers le bas | Série avec résistance 100ohm | Horloge bit I2S0 (RX, associée à SDIx) |
| I2S0_8CH_LRCKRX | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Sortie d'horloge de trame pour l'horloge de sélection de canal (RX, associée à SDIx) |
| I2S0_8CH_SDI0 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 0 |
| I2S0_8CH_SDI1 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 1 |
| I2S0_8CH_SDI2 | Tirer vers le bas | Série avec résistance 100ohm | I2S0 Canal de sortie de données 2 |
| I2S0_8CH_SDI3 | Tirer vers le bas | Série avec résistance 22ohm | I2S0 Canal de sortie de données 3 |
● I2S1
I2S1 prend en charge l'entrée 2 canaux et la sortie 2 canaux. Les recommandations de conception pull-up et correspondantes pour l'interface I2S1 sont présentées dans le tableau suivant.
| Signal | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| I2S1_MCLK | Tirer vers le bas | Série avec résistance 22ohm | I2S1 Sortie horloge système |
| I2S1_SCLK | Tirer vers le bas | Série avec résistance 22ohm | I2S1 Sortie d'horloge binaire |
| I2S1_LRCK_TXRX | Tirer vers le bas | Série avec résistance 22ohm | I2S1 Sortie d'horloge de trame pour l'horloge de sélection de canal |
| I2S1_SDO | Tirer vers le bas | Série avec résistance 22ohm | I2S1 Canal de sortie de données |
| I2S1_SDI | Tirer vers le bas | Série avec résistance 22ohm | I2S1 Canal d'entrée de données |
● I2S2
I2S2 prend en charge la sortie 2 canaux et l'entrée 2 canaux et est utilisé par défaut pour se connecter à l'interface PCM du module BT, servant de port de communication pour la fonction d'appel Bluetooth sous le protocole HFP.
La conception pull-up et correspondante recommandée pour l'interface I2S2 est indiquée dans le tableau suivant.
| Signal | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| I2S2_2CH_MCLK | Tirer vers le bas | Série avec résistance 22ohm | Sortie d'horloge système I2S0_2CH Aucun multiplexage de fonction PCM ne peut être utilisé comme un GPIO normal |
| I2S2_2CH_SCLK PCM_CLK | Tirer vers le bas | Série avec résistance 22ohm | Sortie d'horloge binaire I2S0_2CH Horloge PCM |
| I2S2_2CH_LRCK PCM_SYNC | Tirer vers le bas | Série avec résistance 22ohm | I2S0_2CH Sortie d'horloge de trame pour l'horloge de sélection de canal Synchronisation des trames de données PCM |
| I2S2_2CH_SDO PCM_OUT | Tirer vers le bas | Série avec résistance 22ohm | 2S0_2CH Canal de sortie de données Sortie de données PCM |
| I2S2_2CH_SDI PCM_IN | Tirer vers le bas | Série avec résistance 22ohm | 2S0_2CH Canal d'entrée de données Entrée de données PCM |
Le PX30K fournit un ensemble d'interfaces audio numériques PDM, prenant en charge jusqu'à 8 canaux d'entrée audio au format PDM avec un taux d'échantillonnage maximal de 192 kHz et des débits binaires allant de 16 bits à 32 bits.
Pour coopérer avec RK809-1 pour obtenir une entrée audio, le multiplexage IO est ici relativement flexible, et il faut veiller à éviter l'utilisation répétée du même signal dans différentes positions de multiplexage. Lorsque vous utilisez PDM MIC comme entrée vocale, pour simplifier le traitement logiciel des données d'enregistrement audio, il est recommandé d'utiliser l'interface PDM de manière cohérente pour l'enregistrement et l'entrée. De cette façon, pour les scénarios d'application courants impliquant 2 à 6 canaux d'enregistrement PDM MIC et 1 à 2 canaux d'entrée, un seul enregistrement audio complet de 4 à 8 canaux est nécessaire, et aucun traitement d'épissage supplémentaire n'est requis dans le logiciel.
Si vous devez connecter une entrée micro PDM à 8 canaux, vous ne pouvez utiliser que l'interface I2S comme canal de capture pour l'entrée. Le logiciel doit effectuer un traitement d'épissage audio supplémentaire pour répondre aux exigences de l'algorithme de synchronisation des données.
● Codec
Le RK809-1 est livré avec un codec et est connecté au PX30K via l'interface I2S. La sortie HPSNS du codec sert de référence de décalage interne et doit être connectée à GND. Le routage doit être connecté à GND au niveau de la prise casque pour réduire la différence de potentiel entre le codec et la masse du casque. Si le GND du codec se trouve sur le même plan GND complet que le GND du casque et que la disposition de l'appareil est proche, il peut être directement connecté au plan GND.
Le codec dispose d'un circuit de pilote de haut-parleur mono non filtré intégré qui peut fournir une puissance d'entraînement de 1.3 W à 8 ohms, ce qui répond aux exigences d'application des scénarios monauraux de petite puissance et peut économiser des coûts d'amplification externes supplémentaires. Lors de l'utilisation de cet amplificateur intégré, le circuit d'entrée audio recommandé est le suivant : après division de tension et filtrage, le signal de retour différentiel est émis vers l'interface ADC audio du RK809-1, puis renvoyé vers PX30K via l'interface PDM/I2S après conversion A/N par RK809-1.
Le réglage par défaut pour RK809-1 ici est la communication d'interface PDM avec PX30K, qui est basée sur l'utilisation de microphones PDM, comme décrit dans la section Interface PDM.
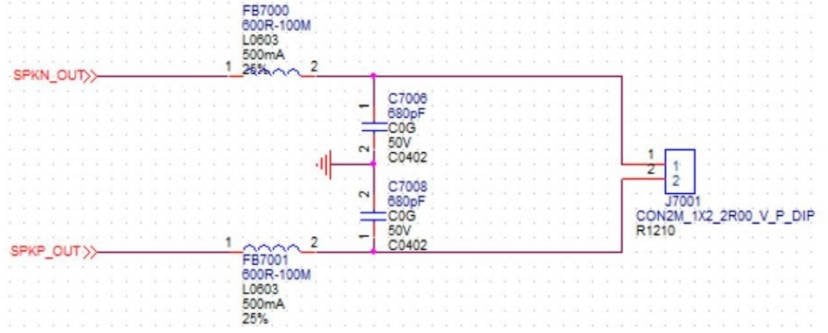
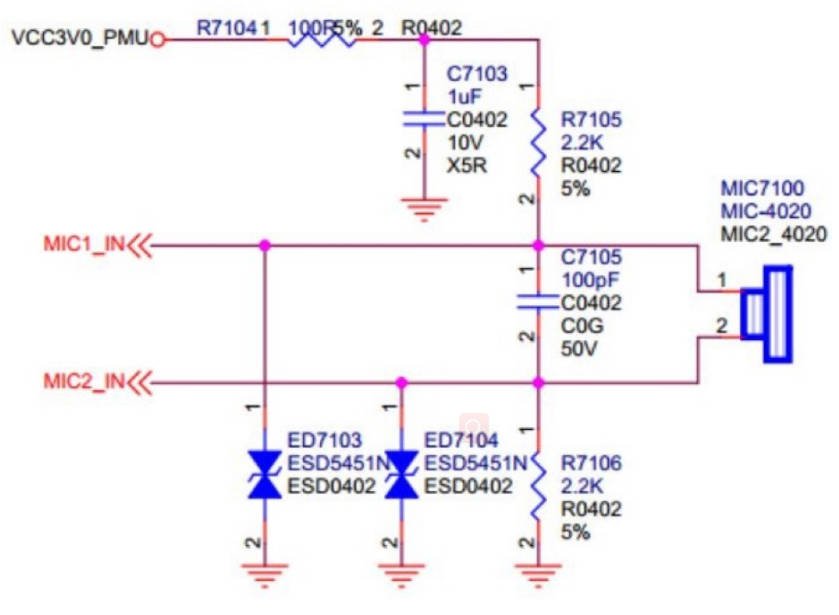
● MIC
Le circuit MIC est illustré dans le schéma suivant. Veuillez sélectionner les résistances de diviseur de tension appropriées R7105 et R7106 selon les spécifications du microphone à électret. Si une interface analogique MEMS MIC est utilisée, veuillez vous référer au circuit de conception spécifiquement recommandé. Si une interface numérique MEMS MIC est utilisée, elle peut être directement connectée à l'I2S0 du PX30K.
Interface vidéo La puce PX30K possède un contrôleur vidéo intégré qui prend en charge trois modes de sortie vidéo : RVB, LVDS et MIPI DSI.
Mode LVDS/MIPI
LVDS/MIPI utilise le même contrôleur et certaines broches sont partagées avec RVB. Lors de l'utilisation de la sortie LVDS/MIPI, le logiciel doit configurer le mode de sortie correspondant.
Règles de conception des signaux LVDS/MIPI :
- Décalage de paire différentielle dans les 2ps.
- Le décalage de groupe de paires différentielles entre Clk et Data est inférieur à 3.5ps.
- La longueur de la paire différentielle est inférieure à 3.6 pouces.
- Le nombre de trous traversants permettant aux paires différentielles de changer de couche est inférieur à 3.
- L'impédance de la paire différentielle est contrôlée dans les 100 ohms +/- 10 %.
- La distance entre les paires différentielles et les autres signaux suit le 3W
principe.
Mode RVB
Le PX30K prend en charge la sortie RVB 24 bits. Lors de l'utilisation de la sortie RVB, le logiciel doit configurer le mode de sortie correspondant.
Lors de l'utilisation d'un écran RGB888 24 bits, la relation de signal correspondante est la suivante :
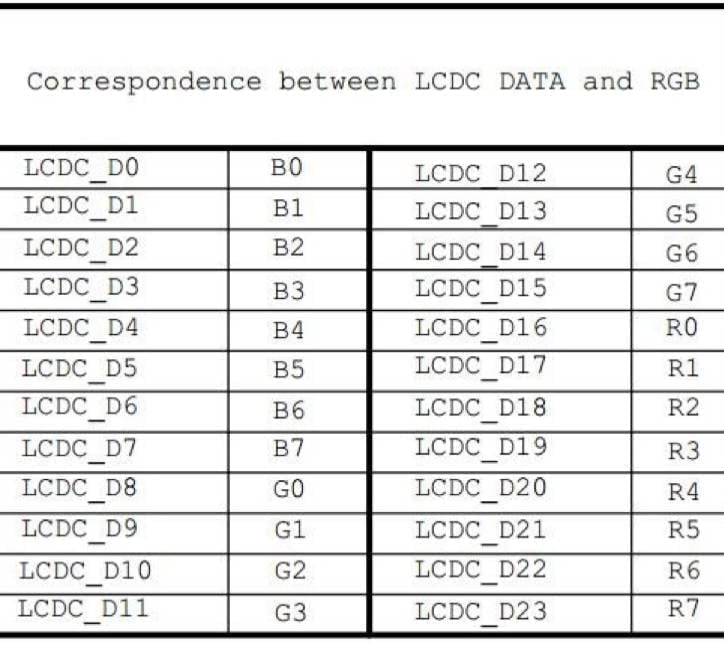
Lors de l'utilisation d'un écran RGB18 666 bits, seuls les signaux de données LCDC_D0-D17 doivent être connectés, et la relation de signal correspondante est la suivante :
MIPI CSI
Le PX30K possède une entrée MIPI-CSI avec un processeur ISP intégré.
Règles de conception des signaux MIPI :
- Décalage de paire différentielle dans les 2ps.
- Le décalage de groupe de paires différentielles entre Clk et Data est inférieur à 3.5ps.
- La longueur de la paire différentielle est inférieure à 3.6 pouces.
- Le nombre de trous traversants permettant aux paires différentielles de changer de couche est inférieur à 3.
- L'impédance de la paire différentielle est contrôlée dans les 100 ohms +/- 10 %.
- La distance entre les paires différentielles et les autres signaux suit le principe 3W.
CAMÉRA CAF
Le domaine d'alimentation pour l'interface CIF est de 3.0 V. Dans la conception réelle du produit, l'alimentation correspondante doit être sélectionnée en fonction des exigences réelles d'alimentation IO de la caméra (1.8 V ou 2.8 V), et le niveau de tension de pull-up I2C doit être cohérent avec celui-ci. Sinon, cela entraînera un dysfonctionnement ou un dysfonctionnement de l'appareil photo. Les broches de l'interface CIF sont multiplexées avec les broches RMII.
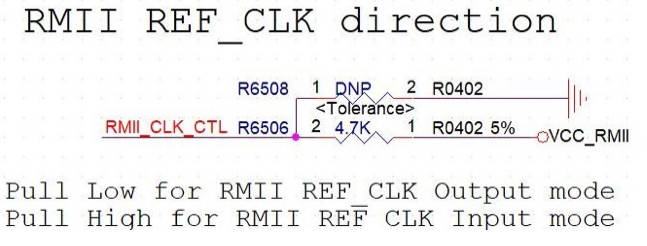
Circuit RM II
Les interfaces RMII et CIF peuvent être multiplexées et configurées pour prendre en charge Ethernet PHY 100 Mbps, permettant la mise en œuvre de la fonctionnalité réseau 100 Mbps. Veuillez vous référer à la documentation de conception du fabricant PHY pour plus de détails sur la conception d'un réseau 100 Mbps. Le signal d'horloge requis par le PHY peut être généré par un cristal externe ou fourni par le signal MAC_CLK de la puce.
La puce PX30K utilise l'ADC_IN2 du SARADC comme port d'échantillonnage d'entrée clé et également pour le mode RECOVER (qui ne nécessite pas la mise à jour de LOADER). Avec le micrologiciel déjà gravé dans le système, tirer ADKEY_IN bas pendant le démarrage du système maintiendra ADC_IN2 à un niveau 0V, permettant au PX30K d'entrer en mode d'écriture du micrologiciel Rockusb. Lorsque le PC reconnaît le périphérique USB, relâchez le bouton pour restaurer ADC_IN2 à un niveau élevé (1.8 V), puis l'écriture du micrologiciel peut être effectuée.
Sur PX30K, la plage d'échantillonnage SARADC est de 0 à 1.8 V et la précision d'échantillonnage est de 10 bits. Le tableau de clés de type parallèle peut ajuster la valeur de la clé d'entrée en ajoutant ou en réduisant les clés et en ajustant le rapport de diviseur de tension pour obtenir une entrée multi-clé pour répondre aux exigences du produit client. Dans la conception, il est recommandé que deux valeurs clés soient supérieures à +/- 35, ce qui signifie que la différence de tension centrale doit être supérieure à 123 mV. La conception de pull-up et d'adaptation recommandée pour l'interface SDIO1 est indiquée dans le tableau suivant.
PX30K prend en charge les modules WIFI/BT avec interface SDIO 3.0. Lors de l'utilisation de modules WIFI/BT avec des interfaces SDIO1 et UART, il est important de s'assurer que l'alimentation des contrôleurs SDIO30 et UART1 de PX1K est cohérente avec le niveau IO du module.
● IDS0
La conception pull-up/down recommandée et la conception correspondante pour l'interface SDMMC0 sont les suivantes :
| Je signale | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| SDI0_DQn[3:0] | Remonter | Série avec résistance 22ohm Le routage peut être retiré temporairement pour les shorts | Transmission et réception de données SDI0 |
| SDI0_CLK | abattre | Série avec résistance 22ohm | Transmission du signal d'horloge SDI0 |
| SDI0_CMD | abattre | Série avec résistance 22ohm Le routage peut être retiré temporairement pour les shorts | Transmission et réception de données SDI0 |
● UART
La conception pull-up/down recommandée et la conception correspondante pour l'interface SDMMC1 sont les suivantes :
| Signal | Tirage interne haut / bas | Méthode de connexion | Description |
|---|---|---|---|
| UART1_RX | Remonter | Connexion directe | Entrée de données UART1 |
| UART1_TX | Remonter | Connexion directe | Sortie de données UART1 |
| UART1_CTSn | Remonter | Connexion directe | UART1 permet la transmission du signal |
| UART1_RTSn | Remonter | Connexion directe | UART1 demande la transmission du signal |
7 Dimensions du produit du DSOM-020 PX30 SOM
| Produit | Paramètre |
|---|---|
| Extérieur | Trou de timbre |
| Taille de la carte mère | 45mm x x 45mm 2.6mm |
| Espacement des broches | 1.2mm |
| Taille du clavier NIP | 2.0mm x 0.7mm |
| Nombre de pins | 144 Pins |
| Warpage | moins de 0.5% |
8 Les méthodes de contrôle thermique du carton support
Il existe un cadre de pilote de système thermique générique dans le noyau Linux qui définit un certain nombre de stratégies de contrôle de la température. Les trois stratégies suivantes sont couramment utilisées actuellement :
- Power_allocator : introduit le contrôle proportionnel-intégral-dérivé (PID),
alloue dynamiquement la puissance à chaque module en fonction de la température actuelle,
et convertit la puissance en fréquence pour obtenir une limitation de fréquence basée sur
température. - Pas à pas : Limite la fréquence des pas en fonction de la température actuelle.
- Espace utilisateur : Ne limite pas la fréquence.
La puce RK3568 possède un capteur T qui détecte la température interne de la puce et utilise la stratégie Power_allocator par défaut. Les états de fonctionnement sont les suivants :
- Si la température dépasse la valeur de température définie :
– Si la tendance de la température est à la hausse, la fréquence est progressivement réduite.
– Si la tendance de la température est à la baisse, la fréquence est progressivement augmentée. - Lorsque la température tombe à la valeur de température définie :
– Si la tendance de la température augmente, la fréquence reste inchangée.
– Si la tendance de la température est à la baisse, la fréquence est progressivement augmentée. - Si la fréquence atteint son maximum et que la température est toujours inférieure à la valeur définie, la fréquence du processeur n'est plus sous contrôle thermique et la fréquence du processeur devient une modulation de fréquence de charge du système.
- Si la puce surchauffe toujours après que la fréquence a été réduite (par exemple, en raison d'une mauvaise dissipation de la chaleur) et que la température dépasse 95 degrés, le logiciel déclenchera un redémarrage. Si le redémarrage échoue en raison d'un blocage ou d'autres raisons et que la puce dépasse 105 degrés, l'otp_out à l'intérieur de la puce déclenchera un arrêt direct par le PMIC.
Remarque : La tendance de la température est déterminée en comparant les températures précédentes et actuelles. Si la température de l'appareil est inférieure au seuil, la température est échantillonnée toutes les l secondes ; si la température de l'appareil dépasse le seuil, la température est échantillonnée toutes les 20 ms et la fréquence est limitée.
Le SDK RK3568 fournit des stratégies de contrôle thermique distinctes pour le CPU et le GPU. Veuillez vous référer au document (Rockchip_Developer_Guide_Thermal) pour les configurations spécifiques.
9 Guide de production du SOM DSOM-020 PX30
Sélectionnez des modules qui peuvent être SMT ou intégrés en ligne selon le schéma de conception de PCB du client. Si la carte est conçue pour le conditionnement SMT, utilisez des modules en conditionnement SMT. Si la carte est conçue pour un assemblage en ligne, utilisez l'assemblage en ligne.
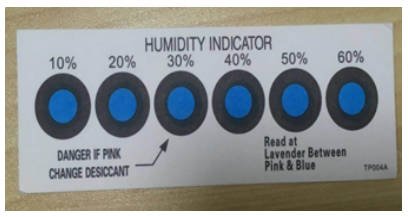
Les modules doivent être soudés dans les 24 heures suivant le déballage. Sinon, placez-les dans une armoire sèche avec une humidité relative ne dépassant pas 10 % ou reconditionnez-les sous vide et notez le temps d'exposition (le temps d'exposition total ne doit pas dépasser 168 heures).
Instruments ou équipement requis pour l'assemblage SMT:
- Monteur CMS
- SPI
- Soudage par refusion
- Testeur de température du four
- AOI
Instruments ou équipement requis pour la cuisson :
- Fours armoires
- Plateaux haute température antistatiques
- Gants antistatiques et haute température
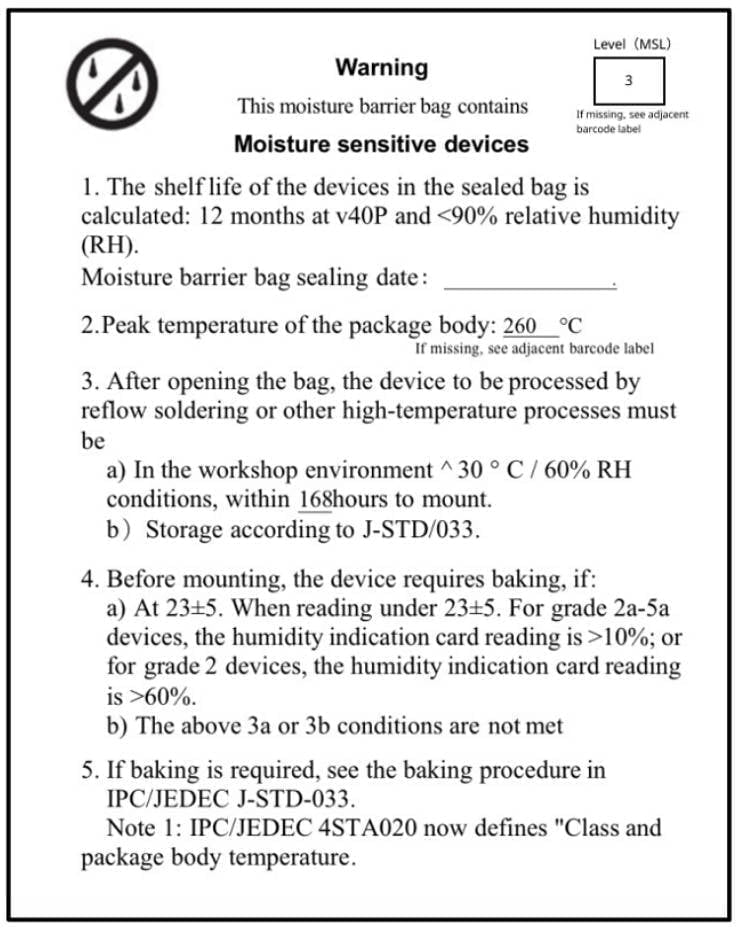
Les sacs étanches à l'humidité doivent être stockés à une température <40°C et une humidité <90% HR. Les produits emballés à sec ont une durée de conservation de 12 mois à compter de la date de fermeture de l'emballage. Emballage scellé avec carte indicateur d'humidité.
Le sac de l'aspirateur se trouve cassé avant le déballage.
Après déballage, le sac se retrouve sans carte d'indicateur d'humidité. La carte d'indicateur d'humidité indique 10 % ou plus après le déballage et l'anneau de couleur devient rose.
La durée totale d'exposition après déballage dépasse 168 heures. Plus de 12 mois à compter de la date du premier emballage scellé.
Les paramètres de cuisson sont les suivants :
Température de cuisson : 60°C pour les bobines, humidité inférieure ou égale à 5% HR ; 125°C pour les barquettes, humidité inférieure ou égale à 5% HR (barquettes résistantes aux hautes températures, pas blisters pour les barquettes).
Temps de cuisson : 48 heures pour un emballage en bobine ; 12 heures pour le conditionnement en palette.
Réglage de la température d'alarme : 65°C pour les packs de bobines ; 135°C pour les packs palettes.
Après refroidissement en dessous de 36°C dans des conditions naturelles, la production peut être effectuée.
Si le temps d'exposition après cuisson est supérieur à 168 heures et n'est pas utilisé, refaire cuire.
Si le temps d'exposition est supérieur à 168 heures sans cuisson, il est déconseillé d'utiliser le procédé de brasage par refusion pour souder ce lot de modules. Les modules sont des appareils sensibles à l'humidité de classe 3 et peuvent devenir humides lorsque le temps d'exposition est dépassé.
Cela peut entraîner une défaillance de l'appareil ou une mauvaise soudure lors d'une soudure à haute température.
Veuillez protéger le module des décharges électrostatiques (ESD) pendant tout le processus de production.
Pour garantir les taux de qualification des produits, il est recommandé d'utiliser des équipements de test SPI et AOI pour surveiller la qualité d'impression et de placement de la pâte à braser.
Veuillez suivre le profil de refusion pour le placement SMT avec une température maximale de 245°C. Le profil de température de refusion est illustré ci-dessous en utilisant la pâte à souder en alliage SAC305 comme exemple.
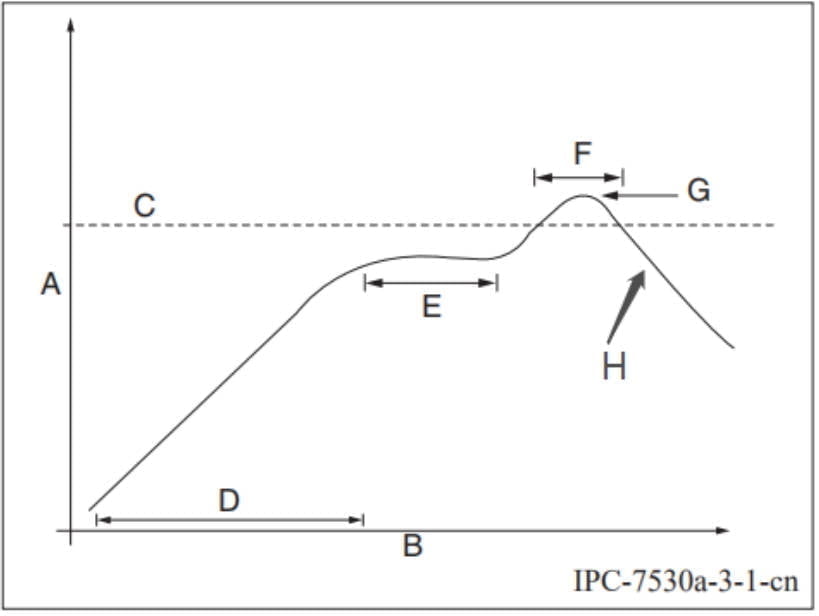
Description des graphiques de courbes.
A : Axe de température
B : Axe du temps
C : température de la ligne de phase liquide de l'alliage : 217-220 °C
D : Pente de montée en température : 1-3°C/s
E : Temps de température constante : 60-120s, température constante : 150-200°C
F : Temps au-dessus de la ligne de phase liquide : 50-70 s
G : Température maximale : 235-245°C
H : pente de réduction de température : 1-4°C/s
Remarque: Les courbes recommandées ci-dessus sont basées sur la pâte à souder en alliage SAC305 à titre d'exemple. Veuillez définir la courbe de température du four recommandée pour les autres pâtes à souder en alliage conformément aux spécifications de la pâte à souder.
| Modèle | RAM | eMMC |
|---|---|---|
| DSOM-020R-K | 1GB | 8GB |
| DSOM-020R-N | 2GB | 32GB |
| DSOM-020R-P | 2GB | 128GB |
documentation
DusunIoT offre un ensemble complet de ressources de développement, y compris QUICK START, SDK, emballage du micrologiciel, micrologiciel du module, outils, divers logiciels tiers, etc.