





1.Product Introduction
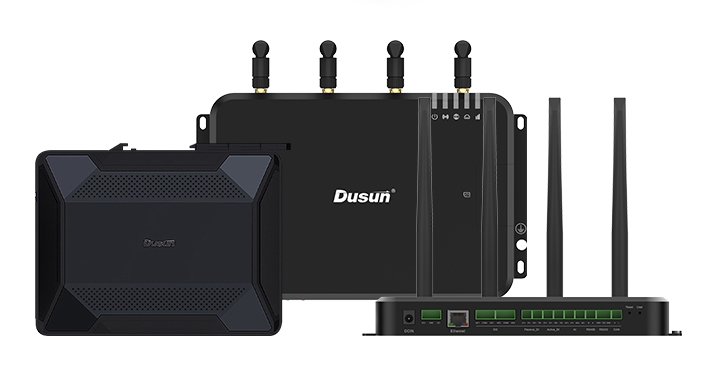
Product overview based on Rockchip RK3588J Designed for Mobile charging robot A high-performance Main control box products. DSGW-390 has an 8-core CPU, 6TOPS independent NPU computing power, strong AI capabilities, and includes rich peripheral interfaces such as USB, LVDS, HMDI, CAN, etc., fully meeting Access requirements for robot multi-sensor perception and control blocks The product meets industrial design standards and adopts metal casing and Anti-vibration interface design, applicable to Outdoor, industrial, severe vibration of the whole machine It supports flexible selection of operating systems, with Ubuntu system as standard, and can also independently run Android / Linux+RTOS fusion operating system. It is mainly used in robot scenarios that require high performance and high computing power, such as mobile charging robots and service robots.
| name | describe |
|---|---|
| Product Model | DSGW-390 |
| CPU | RK3588J |
| RAM | 8GB |
| EMMC | 64GB |
| system | Ubuntu 20.04 |
| Network port | 1 10/100/1000Mbps Ethernet interface |
| USB interface | 3* USB 2.0 +1* USB 3.0 Type A |
| 1* USB Type C | |
| WI-FI | Wifi6, 802.11a/b/g/n/ac/ax 1200Mbps WLAN + BT v5.2 |
| wireless | Support private Lora |
| Audio | Support, dual channel output |
| video | Support, 1 LVDS interface, 1 HDMI interface |
| RTC | support, |
| Debug interface | Support, Phoenix terminal |
| Cooling Solution | Support radiator |
| IO interface | DI,DO,AI, PWM, isolation |
| CAN | 3-way, isolated |
| RS485 | 1-way, isolated |
| power supply | DC power supply voltage range 9~16VDC |
| Operating temperature | -40 to 85 degrees |
| Storage temperature | -40 to 105 degrees |
| PCBA Dimensions | 208.3*147mm |

Dusun integrates the robot main control box industry-related applications on the basis of the standard system, customizes a highly reliable operating system and industry SDK, and completes the transplantation and testing of a variety of hardware peripheral drivers that meet industry applications with many years of experience in the development and design of robot embedded motherboards. The following is the system software framework

In addition, Dongsheng can provide independent system support for various versions of Linux, such as Debian, Ubuntu, Openwrt, etc.
Dongsheng provides the robot master control box industry SDK source code that matches the motherboard, supporting customers to conduct micro-development to achieve rapid productization. Dongsheng Robot Industry SDK has the following features:
1. Streamlined operating system: On the premise of meeting industry applications, the number of components is streamlined, the system resource utilization rate is high, thereby reducing hardware costs, and to a certain extent, the functional structure is optimized, the system architecture is reasonably laid out, and the system is more efficient and easy to maintain;
2. BSP with industry attributes: According to the types of peripheral devices used in the industry, it supports multiple sensor interfaces to facilitate the connection of sensors such as cameras, lidars, IMUs, and supports multi-screen display drivers, as well as multi-channel DIO.AIO for battery management, whole-machine heat dissipation management, whole-machine thermal management, etc. It performs driver transplantation and debugging and adapts industry algorithms to meet customers’ needs for the overall hardware + algorithm solution. In addition, Dongsheng BSP driver will continue to iterate the access of peripheral devices of different brands and models.
3. Pre-installed tools and middleware: Pre-install NPU’s big data model tools (such as ONXX, etc.) and the middleware ROS/ROS2 of the robotics industry in advance, so that users can quickly transplant applications and tree models of other hardware platforms and achieve low-cost hardware platform switching.
| Peripherals | model | illustrate |
|---|---|---|
| fan | 013102018 |
Support PWM speed control Support speed FG signal reading back |
| Water Pump | 043100010 | Support PWM speed control Support speed FG signal reading back |
| trumpet | - | 8W speaker |
| Relay | AP24512ABDNil60 | |
| NTC | PT100 | |
| USB Camera | - | Universal UVC |
| External expansion USB flash drive | TinkPad/Patriot/Kingston mainstream models | Universal 3.0/2.0 USB flash drive |
| Advertising screen | - | HDMI standard display |
| Car display screen | AV123Z7M-N12 (BOE) | Size 12.3 inches, resolution 1920*720, refresh rate 60Hz, |
| Core Algorithm | Matching peripheral hardware | model | illustrate |
|---|---|---|---|
| SLAM Algorithm | LiDAR+Binocular Camera+Motor | SLAMTEC Athena | Robot chassis |
| Face recognition algorithm | Structured light module | RMSL321 | RK NN Deep Algorithm |
| Intelligent voice algorithm | 6-microphone circular array | Can be customized according to structure | Sound pickup and noise reduction, keyword wake-up, voice wake-up |
| Monocular ranging algorithm | Structured light module | RMSL321 | Distance and angle information of visual obstructions |
Note: The above algorithms are not pre-installed in the factory firmware version. If necessary, please contact the corresponding technical window
ROS (Robot Operating System) is pre-installed in the product SDK. As the de facto standard operating system in the field of robotics, ROS provides a wealth of tools and libraries for building complex robotic systems. Pre-installing ROS on RK3588J can greatly simplify the robot development process.
- RK3588J industrial-grade high-performance CPU, integrated with quad-core A76 and quad-core A55 processors, with a maximum main frequency of 2.4GHz;
- G610 MP4 GPU and 6TOPS NPU, providing powerful computing power and graphics and video processing capabilities;
- Support 4G LTE CAT4 (China);
- Supports Wi-Fi 5 and Bluetooth 4.2;
- Provide powerful computing performance and high-performance processing resources for AI edge computing;
- Support industrial bus protocols such as CAN, RS485;
- Supports a variety of isolated DIO and AIO interfaces;
- Support private wireless protocols, such as LoRa private protocol;
2. Installation Instructions
⚠️:This section describes the product packaging form (boxed/antistatic bag, etc.?), packaging size, unit weight, packing instructions, etc.
- Product shipping box type: None.
- Product shipping packaging bag type: PE flat bag.
- Weight of complete stand-alone machine (excluding accessories): 1500g±10g.
- Description of packing: 4 units per box, the packing box is in the form of top and bottom box + pearl cotton.

⚠️:This section describes the factory accessories list of the product
- Product has no accessories.
⚠️:This section describes the installation method and installation precautions of the product. If the product is a complete machine, use diagrams to describe the appropriate installation method and installation steps. If the product is a PCBA, describe the fixed space and air avoidance rules, radiator installation, etc.
- The product is installed by fixing it on the product with corresponding screw posts through M6 screws. Or the product can be fastened to the plate through the combination of M6 screws + M6 nuts, but it should be noted that holes that can pass the screws must be reserved on the plate.

⚠️: Use 2D wireframes to quickly describe the product dimensions. Also provide a link to download the 3D product image.

3. Hardware Instructions






| Serial number | describe | Remark |
|---|---|---|
| 1 | Fan connector | Reserved core board cooling fan interface |
| 2 | Motherboard PCBA | |
| 3 | Core board heat sink | |
| 4 | PCBA of daughter board 1 | |
| 5 | PCBA of daughter board 2 | |
| K1 | RECOVERY button | Not external, for debugging |
| K2 | MASKROM button | |
| K3 | Hard reset button | |
| J1 | 1 passive digital input, 3 digital outputs, 1 NTC temperature sensor input detection and 2 PWM outputs | 1 passive digital input is isolated, 3 digital outputs are open collector outputs, 1 PWM interface is open collector output |
| J2 | 1 485 interface and 3 high-speed CAN interfaces, the maximum rate of CAN interface is 1Mbps | The 485 interface is non-isolated, and the 3-way CAN interface is independently isolated |
| J3 | 2-way speaker output, speaker 8 ohm/3W | 1 speaker for each left and right channel |
| J4 | 2 passive digital inputs, 2 digital outputs and 1 NTC temperature sensor input detection | The 2 passive digital inputs are isolated and the 2 digital outputs are open collector outputs. |
| J5 | Battery power supply interface, voltage range 9V to 12V | |
| J6 | Debug interface | 1 UART interface, CMOS level, level 3.3V, 2.54mm pitch, 3Pin socket |
| LVDS-2 | LVDS screen interface, 2 groups of LVDS interfaces, 4 pairs of signal lines in each group | One 51-pin socket for external use |
| LVDS screen touch interface, USB2.0 HOST interface | ||
| LVDS-1 | LVDS screen backlight driver interface, using PWM to drive the screen brightness | One 14-pin socket for external use |
| LVDS screen temperature detection interface, using NTC temperature sensor to measure the screen temperature | ||
| ANT1 | LTE 4G Main Antenna | These three antennas are derived from the LTE 4G CAT4 module, module model EC20CEFILG-128-SGNS, Quectel Communications |
| ANT2 | LTE 4G GPS Antenna | |
| ANT3 | LTE 4G Diversity Antenna | |
| ANT4 | WIFI&BT integrated antenna | |
| ANT5 | Lora Antenna | |
| USB1 | USB2.0 HOST interface | |
| USB2 | USB2.0 HOST interface | |
| USB3 | USB2.0 HOST interface | |
| USB5 | USB3.0 HOST interface | |
| USB6 | DP screen interface, multiplexed with the firmware burning interface | External use Type C female connector |
| HDMI0 | Connect HDMI display 0 | |
| HDMI1 | Connect HDMI display 1 | |
| RJ45 | 10/100/1000Mbps Ethernet interface | |
| SIM | LTE 4G SIM card interface | Micro-SIM card slot,Supports China Mobile, China Telecom and China Unicom |
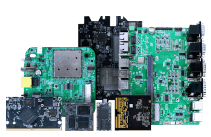
The mainboard uses the RK3588J core board. The position of the core board on the PCBA is shown in the figure below:

The four corners in the above picture are the four columns for fixing the core board. The size parameter is M2*3.0, and the corresponding fixing screw size can be M3*6.0mm.
The core board used on this PCBA has a RAM capacity of 8GB and an EMMC capacity of 64GB.